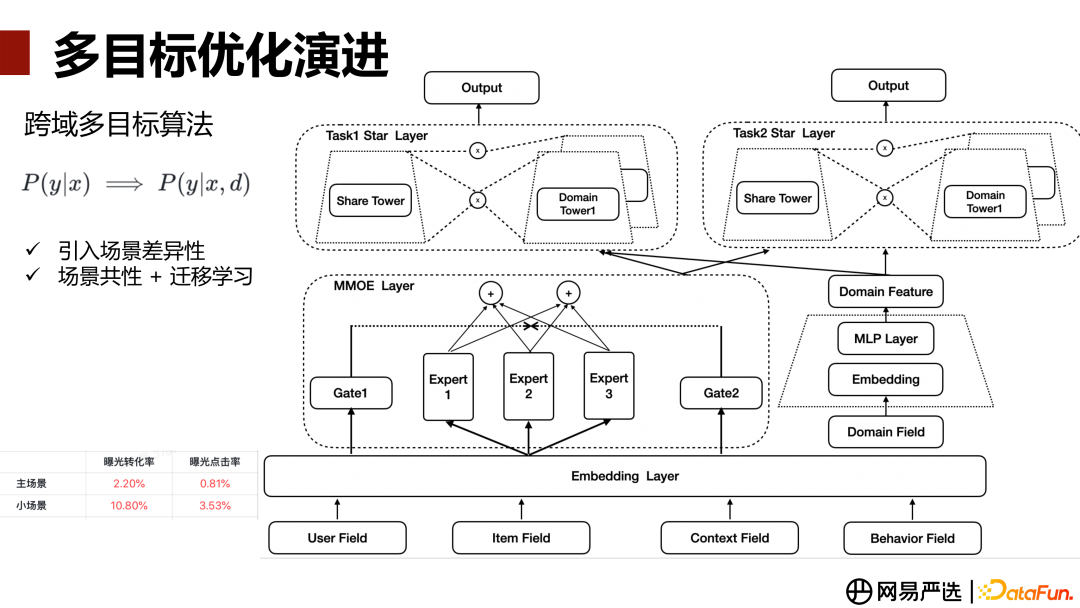
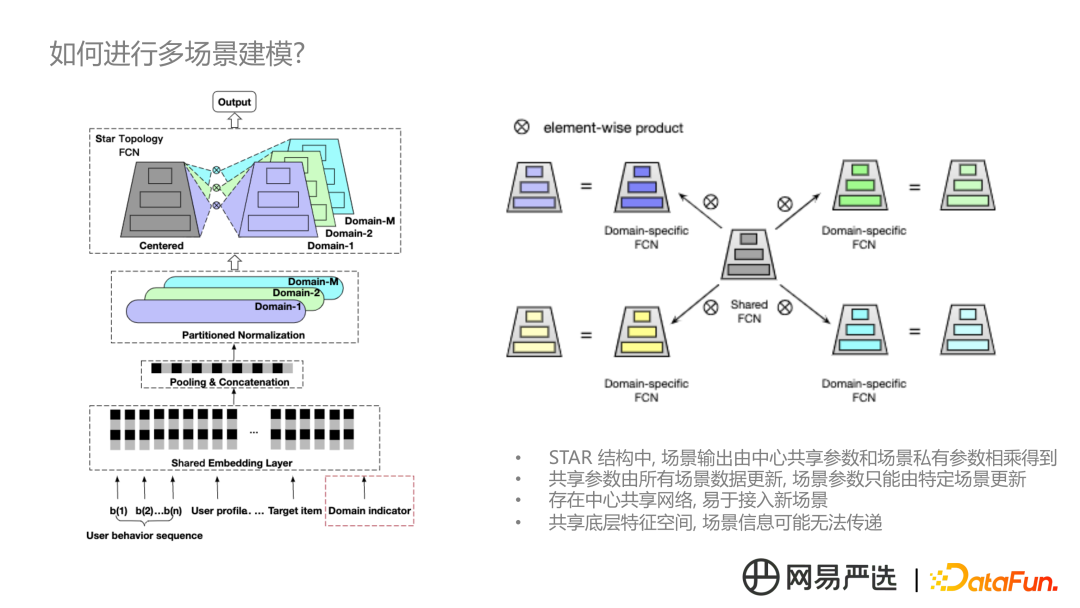
在实践中参考的另一个解决方案是阿里的 STAR 星型结构模型,底层是特征共享层,往上 BatchNorm 的时候,区分场景分别进行,顶层不同的场景分别对应一个塔,同时有一个共享的中心塔。最终每个场景的输出结果是由场景塔和中心塔相乘得到的,参数更新方式是共享的参数是由所有场景的样本数据同时更新,场景参数只能由特定场景的样本去更新。但这个方案也存在场景特征信息无法显示表达的问题,因为底层的特征空间是共享的。为了解决这个问题,它的做法是把场景特征过一个偏置网络,把场景信息的信息直接传递到输出层,类似方案一。



 发表于 2022-12-28 14:08:42
发表于 2022-12-28 14:08:42