|
|
1、PNC融入深度学习 预测决策联合建模
基于学习的规控系统(PNC)是业界大家普遍关注的问题,很多人会开玩笑说,业界的规控代码就是一些if-else的堆砌。其实这样的比喻并不夸张。PNC一般包括了预测、决策、轨迹规划和控制四个部分,预测、决策和轨迹规划都是非常困难的问题。
经典的预测方法是基于地图规则和动力学模型的。过去几年,轨迹预测模块逐渐引入了一系列深度学习的方案如TNT、SceneTransformer,都使得预测能力显著提升。
经典的决策方案会根据场景进行拆分,例如高速、路口、环岛,然后根据每一种场景下的车辆状态进行规则拆分,例如匀速、减速、变道、加塞。这样我们就有了一个复杂的有限状态机,状态机的节点是行为决策,边是状态变化的条件。
如何拆分是每个公司自己积累的“手艺”,如果拆分的好,整个图的结构会比较清晰,如果拆分的不好,往往随着系统更新、策略分叉,变成一个规则补丁系统。更困难的是,随着驾驶城市的扩展,不同城市的同样场景可能有差异,需要不同决策,最终导致决策分叉爆炸,难以维护。
经典的轨迹规划方案通常先根据可行区域进行路径搜索,然后对得到的粗略轨迹进行优化,求解出一条安全和可行的时空轨迹。
百度的学习型PNC方案是将预测和决策两个模块联合建模,然后送入到轨迹规划和控制模块中。具体来说:
- 先提取场景里自车特征,环境车辆的特征,地图的特征,使用一个Scene Transformer来融合特征;
- 输出两个分支,一个分支输出环境车的决策和轨迹;
- 另一个分支输出自车规划的轨迹初始值(trajectory seeds);
- 将轨迹初始值输入到轨迹规划模块,进行进一步的搜索和优化,得到最终的轨迹。
以上的方案是一个比较端到端的方法,搭建端到端的模型并不是最困难的,更难的问题是,在没有规则约束下(如“红灯停绿灯行”),如何保证模型的输出决策的合理性呢?百度给出的答案是,利用经验系统来初始化决策模型,让模型的表现接近规则系统,然后让模型利用真实数据进行迭代,逐渐超越经验系统。此外,由于轨迹规划模块的存在,仍然可以兜底确保最后轨迹的安全性。
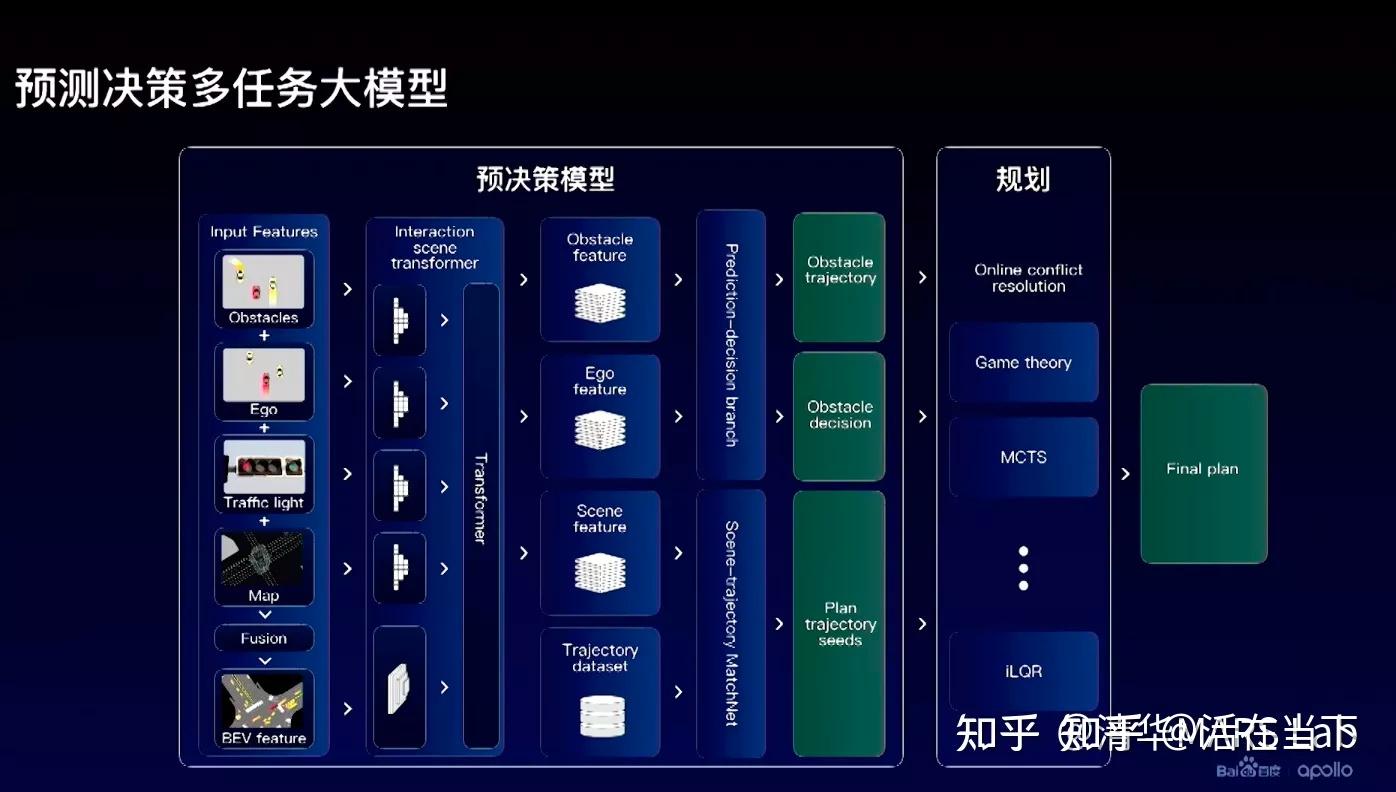
图 预测决策大模型结构
后面可以阅读一下apollo7.0相关的learn base planner 以及预测相关的东西,进一步理解将预测与决策相结合的思想来源。 |
|



 发表于 2023-1-7 20:56:17
发表于 2023-1-7 20:56:17